Automatic Bird Feeding Mechanism
A multidisciplinary project aiming at automating orphaned birds feeding task. It involves storing and cooling paste food, heating the food for use, and pumping it for feeding. The tip of the feeding hose should be near the bird's mouth, so we use a robot arm to get it to the right position. Finally, there is a web interface that enables the user to monitor temperatures and input commands.
Fenrir: Robotic Arm

We designed and build a robot arm from scratch in Autodesk Inventor, and also wrote ROS1 interfaces in python for the Dynamixel servos we used. Finally, a visual simulation of the arm is accomplished using the URDF robot file description.
Robot View: 3D Map with Object Detection
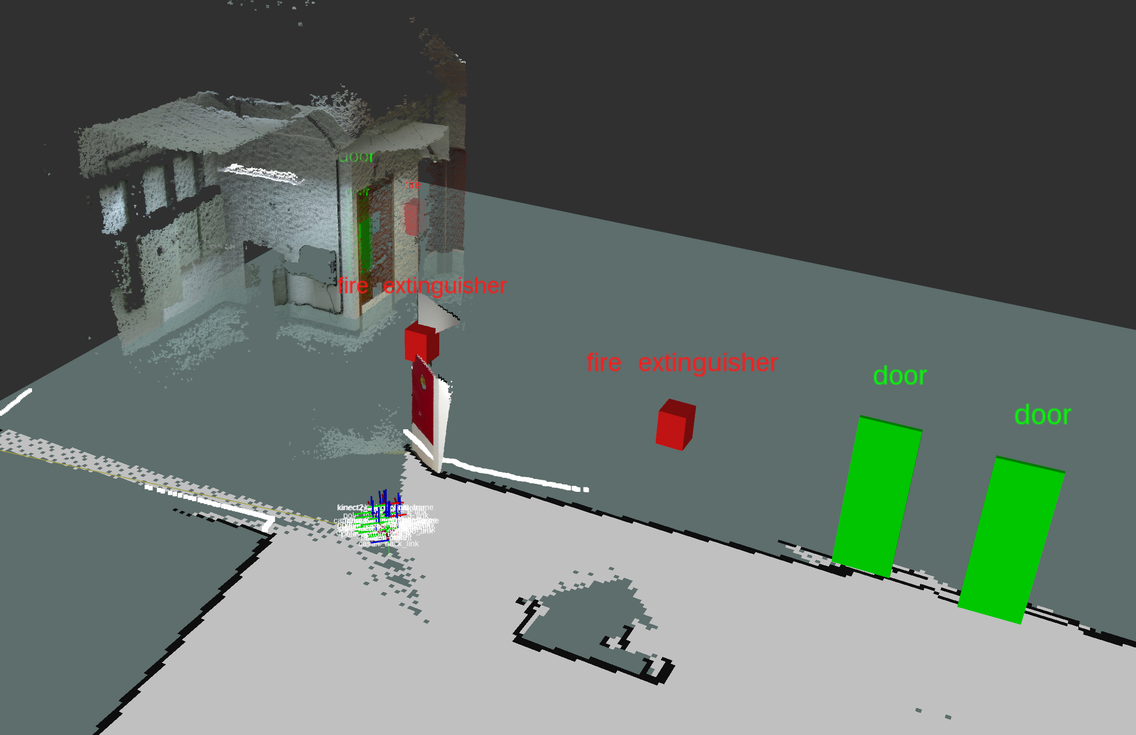
A system that combines SLAM with object detection from an RGBD camera to create a better scene understand for robotic system. It's written in python, with some C++ modules for point cloud processing. Also, interprocess communication is done using ROS1.